


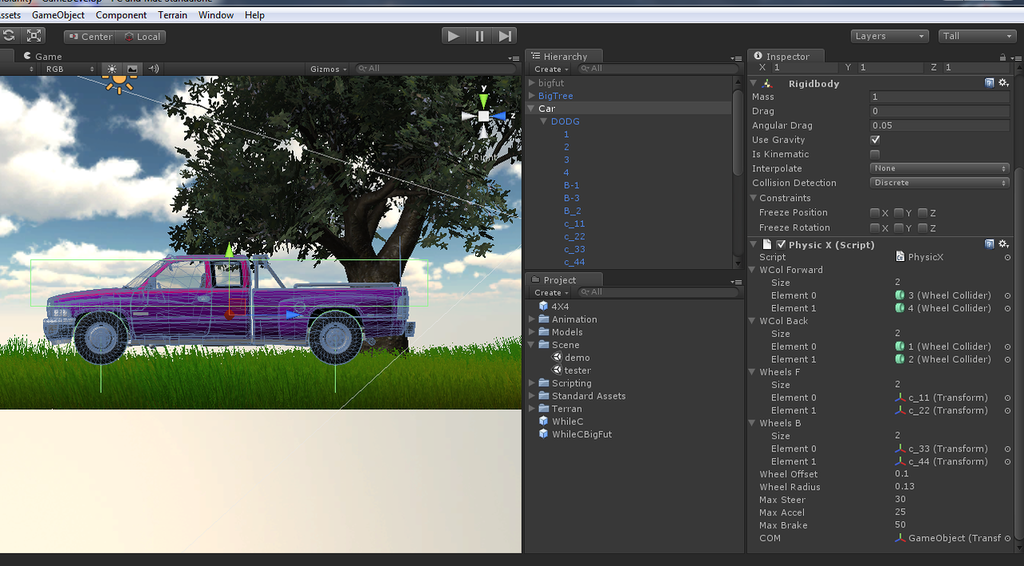
 а это же запущеная игра в редакторе
а это же запущеная игра в редакторе  Как можно решить эту проблему?
Как можно решить эту проблему?Вот скрипт который используется
Синтаксис:
Используется csharp
using UnityEngine;
using System.Collections;
public class PhysicX : MonoBehaviour
{
public WheelCollider[] WColForward;
public WheelCollider[] WColBack;
public Transform[] wheelsF; //1
public Transform[] wheelsB; //1
public float wheelOffset = 0.1f; //2
public float wheelRadius = 0.13f; //2
public float maxSteer = 30;
public float maxAccel = 25;
public float maxBrake = 50;
public Transform COM;
public class WheelData
{ //3
public Transform wheelTransform; //4
public WheelCollider col; //5
public Vector3 wheelStartPos; //6
public float rotation = 0.0f; //7
}
protected WheelData[] wheels; //8
// Use this for initialization
void Start()
{
rigidbody.centerOfMass = COM.localPosition;
wheels = new WheelData[WColForward.Length + WColBack.Length]; //8
for (int i = 0; i < WColForward.Length; i++)
{ //9
wheels[i] = SetupWheels(wheelsF[i], WColForward[i]); //9
}
for (int i = 0; i < WColBack.Length; i++)
{ //9
wheels[i + WColForward.Length] = SetupWheels(wheelsB[i], WColBack[i]); //9
}
}
private WheelData SetupWheels(Transform wheel, WheelCollider col)
{ //10
WheelData result = new WheelData();
result.wheelTransform = wheel; //10
result.col = col; //10
result.wheelStartPos = wheel.transform.localPosition; //10
return result; //10
}
void FixedUpdate()
{
float accel = 0;
float steer = 0;
accel = Input.GetAxis("Vertical");
steer = Input.GetAxis("Horizontal");
CarMove(accel, steer);
UpdateWheels(); //11
}
private void UpdateWheels()
{ //11
float delta = Time.fixedDeltaTime; //12
foreach (WheelData w in wheels)
{ //13
WheelHit hit; //14
Vector3 lp = w.wheelTransform.localPosition; //15
if (w.col.GetGroundHit(out hit))
{ //16
lp.y -= Vector3.Dot(w.wheelTransform.position - hit.point, transform.up) - wheelRadius; //17
}
else
{ //18
lp.y = w.wheelStartPos.y - wheelOffset; //18
}
w.wheelTransform.localPosition = lp; //19
w.rotation = Mathf.Repeat(w.rotation + delta * w.col.rpm * 360.0f / 60.0f, 360.0f); //20
w.wheelTransform.localRotation = Quaternion.Euler(w.rotation, w.col.steerAngle, 90.0f); //21
}
}
private void CarMove(float accel, float steer)
{
foreach (WheelCollider col in WColForward)
{
col.steerAngle = steer * maxSteer;
}
if (accel == 0)
{
foreach (WheelCollider col in WColBack)
{
col.brakeTorque = maxBrake;
}
}
else
{
foreach (WheelCollider col in WColBack)
{
col.brakeTorque = 0;
col.motorTorque = accel * maxAccel;
}
}
}
}
using System.Collections;
public class PhysicX : MonoBehaviour
{
public WheelCollider[] WColForward;
public WheelCollider[] WColBack;
public Transform[] wheelsF; //1
public Transform[] wheelsB; //1
public float wheelOffset = 0.1f; //2
public float wheelRadius = 0.13f; //2
public float maxSteer = 30;
public float maxAccel = 25;
public float maxBrake = 50;
public Transform COM;
public class WheelData
{ //3
public Transform wheelTransform; //4
public WheelCollider col; //5
public Vector3 wheelStartPos; //6
public float rotation = 0.0f; //7
}
protected WheelData[] wheels; //8
// Use this for initialization
void Start()
{
rigidbody.centerOfMass = COM.localPosition;
wheels = new WheelData[WColForward.Length + WColBack.Length]; //8
for (int i = 0; i < WColForward.Length; i++)
{ //9
wheels[i] = SetupWheels(wheelsF[i], WColForward[i]); //9
}
for (int i = 0; i < WColBack.Length; i++)
{ //9
wheels[i + WColForward.Length] = SetupWheels(wheelsB[i], WColBack[i]); //9
}
}
private WheelData SetupWheels(Transform wheel, WheelCollider col)
{ //10
WheelData result = new WheelData();
result.wheelTransform = wheel; //10
result.col = col; //10
result.wheelStartPos = wheel.transform.localPosition; //10
return result; //10
}
void FixedUpdate()
{
float accel = 0;
float steer = 0;
accel = Input.GetAxis("Vertical");
steer = Input.GetAxis("Horizontal");
CarMove(accel, steer);
UpdateWheels(); //11
}
private void UpdateWheels()
{ //11
float delta = Time.fixedDeltaTime; //12
foreach (WheelData w in wheels)
{ //13
WheelHit hit; //14
Vector3 lp = w.wheelTransform.localPosition; //15
if (w.col.GetGroundHit(out hit))
{ //16
lp.y -= Vector3.Dot(w.wheelTransform.position - hit.point, transform.up) - wheelRadius; //17
}
else
{ //18
lp.y = w.wheelStartPos.y - wheelOffset; //18
}
w.wheelTransform.localPosition = lp; //19
w.rotation = Mathf.Repeat(w.rotation + delta * w.col.rpm * 360.0f / 60.0f, 360.0f); //20
w.wheelTransform.localRotation = Quaternion.Euler(w.rotation, w.col.steerAngle, 90.0f); //21
}
}
private void CarMove(float accel, float steer)
{
foreach (WheelCollider col in WColForward)
{
col.steerAngle = steer * maxSteer;
}
if (accel == 0)
{
foreach (WheelCollider col in WColBack)
{
col.brakeTorque = maxBrake;
}
}
else
{
foreach (WheelCollider col in WColBack)
{
col.brakeTorque = 0;
col.motorTorque = accel * maxAccel;
}
}
}
}
